These are the projects currently taking place at eSpace and within the student associations for Spring 2026.
Whether you want to find a project or propose one, make sure to check the guidelines of your section first.
Each section has its own rules for semester projects that will apply by default.
The master project guidelines are the official rules for the entire EPFL.
The ClearSpace Prize honors an EPFL student whose semester project or Master’s thesis shows excellence and advances research in space sustainability.
-
Advanced planetary imaging via low-noise SPAD detection
-
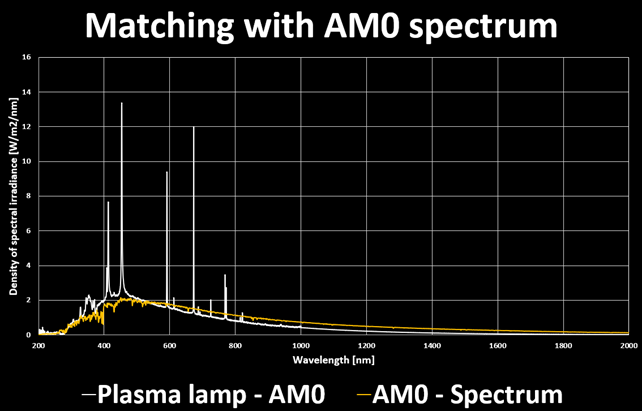
Internship with Lumartix SA: A solar simulation lighting system for the AM0 spectrum
-
Robotic Fiber Positioner Module Testing
-

Proton Irradiation of Nvidia GPU
-
Search for satellite reentry-driven metallic aerosols in the atmosphere
-

Improve accuracy of reentry trajectories
-

Life Cycle Assessment data augmentation and ecodesign optimization using machine learning
-

Investigate the break-up of the geostationary satellite Luch/Olymp
-

Characterize the most dangerous derelict objects in Low Earth Orbit
-
Support the IAU Center for the Protection of Dark and Quiet Skies
-
Design and manufacturing of space-grade electronic hardware for educational test in TVAC and Clean Room
-

EPFL Rocket Team
-
EPFL Spacecraft Team
-

Xplore
-

Asclepios
Advanced planetary imaging via low-noise SPAD detection
- Supervision: LUMES/LASTRO/eSpace (Prof. Fabrizio Carbone/Prof. Jean-Paul Kneib/Stephan Hellmich) with external support from UniGE
- Type of Project: Master thesis project
- Duration: 26 weeks (Official start/end date: TBD)
- Submission of final report: TBD
- Final Presentation: TBD
- Recommended: This project is suitable for a student interested in optical design, telescope instrumentation and astronomy.
CONTEXT
The laboratory for ultrafast microscopy and electron scattering (LUMES) at the EPFL, in collaboration with the EPFL Laboratory of Astrophysics, EPFL Space Center and the University of Geneva, proposes a master thesis project titled “Advanced planetary imaging via low-noise SPAD detection”. The project aims at optically configuring TELESTO, a visible light 60 cm aperture reflector telescope at the observatory of Geneva in Versoix to perform planetary imaging with a new detector offering unprecedented signal to noise ratio and very high frame rates. Such a detector, based on the SPAD technology, has 10 microns-sized pixels, thus requiring the extension of the telescope focal by optical refractive tools (Barlow lens). The project is expected to last six months, a compensation for the living costs is also foreseen.PROJECT SCOPE
The student is expected to learn the basics of ray tracing optics (Opticad, Zemax) and design and test the proper combination of focal extender and filters for the specific camera. They are also expected to install the new detector and develop a basic image acquisition software. Finally, the student will perform test observations with the new detector on planets and potentially the sun and satellites in Low-Earth Orbit.TASKS
- Familiarize yourself with ray tracing software and TELESTO
- Develop a suitable configuration for installing the SPAD detector
- Commission the instrument on the telescope
- Develop basic image acquisition software
- Perform test observations
CONTACT
Dr. Stephan Hellmich: stephan.hellmich@epfl.chSTATUS OF THE PROJECT
Internship with Lumartix SA: A solar simulation lighting system for the AM0 spectrum
- Supervision: Lumartix SA, Aubonne

- Type of Project: Master/Bachelor Internship
- Duration: 26 weeks (Official start/end date: 1 July – 31 December 2026)
- Submission of final report: TBD
- Final Presentation: TBD
- Recommended: This project is suitable for a student with a solid foundation in electricity and electronics, including experience in PCB design and manufacturing.
This internship will involve the development of a next-generation solar simulator designed to reproduce the AM0 spectrum for high-efficiency triple-junction (3J) and quadruple-junction (4J) solar cells.
The successful candidate will be actively involved in the full development cycle of the system, with a strong focus on the optical design and implementation. Responsibilities will include the design and optimization of the optical components, as well as the complete characterization and performance validation of the system through advanced measurements.
A key aspect of this internship is the hands-on development of a functional prototype, giving you the opportunity to apply your theoretical knowledge to a real industrial project and gain practical experience in a high-tech environment.
The student is expected to have a solid foundation in electricity and electronics, including experience in PCB design and manufacturing. Knowledge of mechanical design and basic optics is also required to successfully contribute to the development of the system.
For the optical and photometric aspects of the project, training will be provided. The student will have access to advanced measurement equipment and will be trained in its proper use for system characterization and validation.
Details
Lumartix SA,
Rue de l’Ouriette 131,
1170 Aubonne,
SwitzerlandAny time from the 1st July to the 31 December 2026
Robotic Fiber Positioner Module Testing
- Supervisor: prof. Jean-Paul Kneib
- Type of Project: Master’s project
- Duration: 4 months (start in Spring 2026, start date flexible)
- Submission of final report: 4 months after start of the project, per Master’s thesis duration
- Final Presentation: TBD
- Recommended: This project is suitable for a student interested in astronomy, robotics, astrophysics instrumentation and high precision systems. The student should have good knowledge and experience in Python.
CONTEXT
The Astrobots group at EPFL laboratory of astrophysics (LASTRO) develops high-precision robots for positioning optical fibers in large telescopes. Those telescopes are namely used to study dark energy and dark matter. A big number of those robotic fiber positioners are placed on the focal plate of the telescope, where the gathered light arrives. Those robots will then precisely position the fibers to the desired location to gather light from stars and galaxies.
The robotic fiber positioners require extensive testing in order to ensure compliance to requirements, which is one of the main tasks of Astrobots. More info on Astrobots can be found here.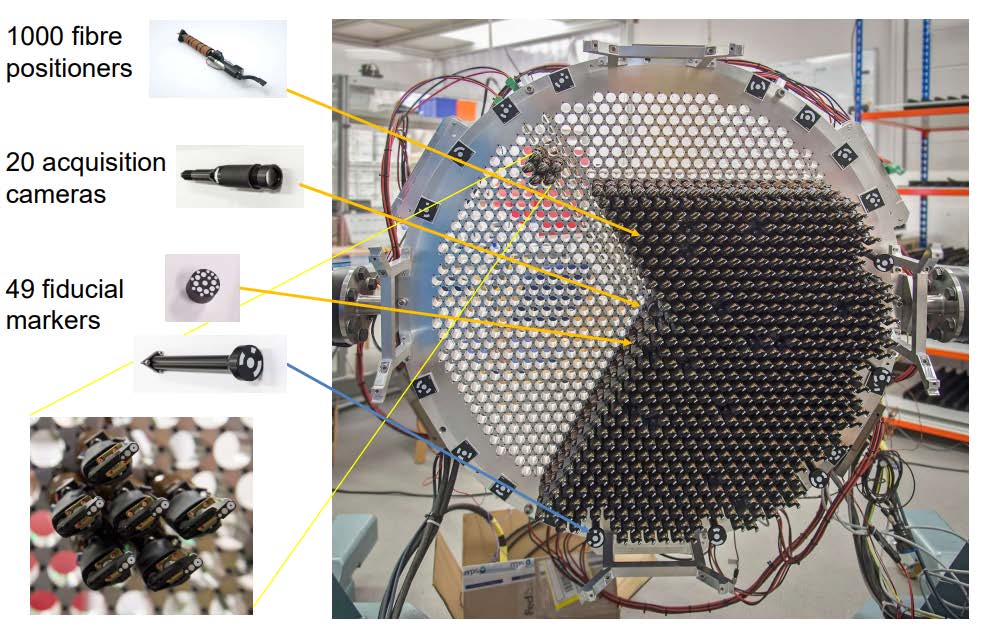
Figure 1: MOONS focal plane filled with robotic positioners
Source: Steven Beard et al., Control and Collision Avoidance with the MOONS Fibre Positioners, UK Astronomy Technology Centre.
https://indico.esrf.fr/event/4/contributions/125/attachments/44/145/Steven_BEARD_FibrePosititionerControl_EIRO_Forum_01_06_22.pdf
PROJECT DESCRIPTION
The team is currently busy conducting different tests on the positioner module prototypes. The Master’s student would be responsible for conducting some of those tests. These can include accuracy test, thermal stability test, and testing the positioners with different current and speed input values. The student may also be asked to help on other existing tests, namely for running the tests, analyzing the data and reporting the data. Here is a list of tests that could be tackled by the student:
- Accuracy testing: adaptation of existing code to new positioners
- XY tests under different speed and current conditions
- Thermal cycling test: mimic on-site temperature variation conditions, thermal cycling
- Use of “collision avoidance” to isolate positioners individually
- Lifetime test: application and adaptation of collision avoidance for positioners lifetime testing
- Collision test
The exact tests will be defined by discussion with the student.
REQUIRED PROFILE
- M.Sc. in microengineering, robotics, computer science or similar
- Good Experience and proficiency with Python
- Proficiency in GitHub version control
- Attention to detail, carefulness working with fragile robotic systems
- Ability to write well-structured and modular code
- Proactive, problem-solving skills
Starting time would be spring 2026, but is flexible (can be earlier, but not too late).
CONTACT
Jonathan Wei: jonathan.wei@epfl.ch
STATUS OF THE PROJECT
Proton Irradiation of Nvidia GPU
- Supervisor: CVLab, Mathieu Salzmann and Andrew Price
- Type of Project: Master project, 1 student
- Duration: 1 Semester
- Recommended: This project is suitable for a student interested in the space sector, hands on experiments, and/or electromagnetic radiation.
RECOMMENDED
This project is suitable for a student interested in one or more of the following topics: the space sector, hands on experiments, machine learning, electromagnetic radiation, and/or edge deployment.
CONTEXT
CVLab and the Space Centre are currently engaged in research supporting deploying machine learning algorithms on edge devices in-orbit. This includes power constraints, bandwidth constraints, explainable AI, and improving fault-tolerance of machine learning algorithms.
With funding secured from ESA and the Swiss Space Office, CVLab and the Space Centre will perform some radiation experiments at the PSI Proton Irradiation Facility. A machine learning algorithm will be deployed to a Nvidia Jetson Orin NX. A proton beam will irradiate the jetson to cause Single Event Events (SEEs). When exposed in such a manner, an SEE can cause bit flips in the machine learning algorithm resulting in reduced performance or outright failure.
PROJECT SCOPE
The student will support the proton irradiation experiments and validation against simulated results. The student will prepare practice runs of the radiation testing and then perform the radiation testing at the Paul Scherrer Institute. The student will log and analyze the results.
EXPECTED OUTCOME
- Completion of proton radiation experiments on Nvidia Jetson Orin NX
- Validation against simulation results (provided by Andrew)
- Thesis / report
LIST OF TASKS AND TENTATIVE PLANNING:
- Familiarize self with literature; effect of radiation on hardware.
- Familiarize self with hardware.
- Perform radiation experiment test runs.
- Perform radiation experiment at the Paul Scherrer Institute
- Analyze the fault propagation through the devices.
- Comparison of experimental results to simulated results.
- Report writing
REQUIREMENTS
- Excellent python programming; C is an asset
- Experience with edge devices or deployment is an asset
- Independent methodical worker, ability to troubleshoot
- Good communication skills in English
TYPE OF WORK
20% Theory, 50% Experiments, 20% Analysis, 10% Documentation
CONTACT
Dr. Andrew Price: andrew.price@epfl.ch
REFERENCES
- Sources of Single Event Effects in the NVIDIA Xavier SoC Family under Proton Irradiation https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9897236
- Proton Evaluation of Single Event Effects in the NVIDIA GPU Orin SoM: Understanding Radiation Vulnerabilities Beyond the SoC https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=10616076
- Using ensemble learning to improve to improve radiation tolerance of CNNs in space applications
https://zenodo.org/records/13885495
STATUS OF THE PROJECT
Search for satellite reentry-driven metallic aerosols in the atmosphere
- Supervisor: LAPI/UNIGE/eSpace (Athanasios Nenes, Nicolas Billot, Stephan Hellmich)
- Type of Project: Master thesis project
- Duration: 26 weeks (Official start/end date: TBD)
- Thesis submission date: TBD
- Final Presentation date: TBD
- Recommended: This project is suitable for a student interested in spectroscopy and space sustainability.
CONTEXT
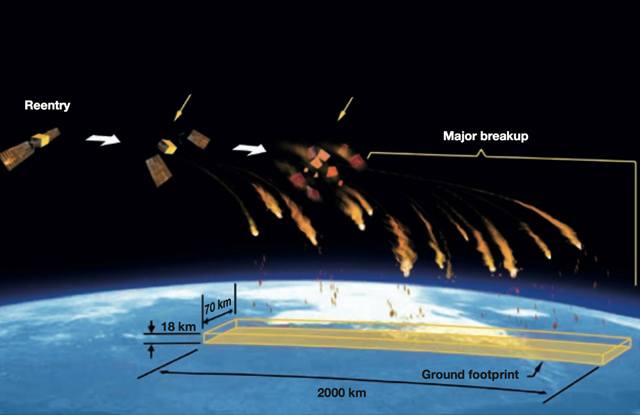
The number of satellites in Low Earth Orbit (LEO) is projected to increase exponentially over the next decade. When these satellites reach the end of their life cycles, they are de-orbited and almost entirely sublimated during atmospheric reentry due to intense frictional heating. This process injects significant quantities of anthropogenic metallic vapors (primarily aluminum, magnesium, and lithium) into the stratosphere and upper atmosphere.
These satellite-derived materials have the potential to alter atmospheric chemistry, impact ozone depletion, and change the radiative properties of the atmosphere. While recent high-altitude aircraft sampling has confirmed the presence of these metals, there is a significant need to determine accurate abundances to monitor the amount of contamination and to provide atmospheric modeling with important information required to investigate the consequences of these “human-made” changes to the atmosphere.
UNIGE has collected nearly a decade worth of high-resolution spectroscopic data of the Sun to support exoplanet science (HELIOS project, using the Sun to predict stellar contamination from nearby planet-hosting stars). A by-product of this dataset is a series of high signal-to-noise transmission spectra of the Earth atmosphere covering the range 0.4-1.8 micron. This dataset has a unique potential to reveal traces of materials that have been injected in the upper atmosphere from satellite vaporization during reentry events.
PROJECT SCOPE AND TASKS
The successful candidate will explore the dataset and search for traces of satellite material in the atmosphere. The investigation consists of the following tasks:
- Familiarize yourself with the data and software tools (collaboration with astronomers)
- Understand the processes related to satellite reentries
- Compute CCFs (cross-correlation function) between the residuals and a set of masks for example for Aluminium oxide
- Exploit the findings to simulate the projected atmospheric contamination
Note that the project is exploratory and you will contribute to defining its actual boundaries.
Please bring an inquisitive mind!
STATUS OF THE PROJECT
Improve accuracy of reentry trajectories
- Supervision: eSpace/LASTRO (Prof. Jean-Paul Kneib/Stephan Hellmich) with external support from TU Delft (Dominic Dirkx)
- Type of Project: Master thesis project
- Duration: 18/26 weeks (Official start/end date: TBD)
- Submission of final report: TBD
- Final Presentation: TBD
- Recommended: This project is suitable for a student interested in orbital mechanics, atmospheric modelling and space sustainability.
CONTEXT
During the last five years, the number of satellites in orbit has dramatically increased due to the satellite mega constellations that are currently installed in low Earth orbit (LEO). The high pace in the development of new satellite communication technologies results in mega constellation satellites being frequently replaced which in turn leads to the number of objects that reenter Earth’s atmosphere significantly increases. To reduce ground casualty risks, the satellites are designed for optimal demise which results in almost the entire mass of the satellites being dispersed in the atmosphere. The substances released during the demise have consequences that need to be quantified in order to understand the implications of the increasing number of reentries. This project aims to improve the accuracy of reentry trajectories to enable dedicated observations of satellite demise that are required to quantify the implications on the atmosphere.
PROJECT SCOPE
Most reentries are uncontrolled which means that the exact location is not known and makes dedicated observations of the breakup and demise impossible. During the last few orbits, the trajectory of a LEO satellite is increasingly influenced by atmospheric drag. Precise propagation of the trajectory thus relies on information of the shape and attitude of the satellite as well as timely atmospheric data on density and wind speeds in the atmosphere. This project aims to incorporate this information in orbit propagation to increase the accuracy of the predicted reentry location. It is planned to implement these capabilities as into the open-source astrodynamics library “TU Delft Astrodynamics Toolbox” Tudat[1] , developed at TUDelft. Tudat already contains basic functionality to consider object shape and attitude as well as information on the atmosphere using the NRLMSISE-00[2] global reference atmospheric model. The main objective of this project is to implement a more accurate atmospheric model that can incorporate real-time weather data and provides more comprehensive data required to determine the precise reentry point.
TASKS
- Familiarize yourself with Tudat
- Perform a literature review of available atmospheric models that can be implemented
- Identify and implement the most suitable model
- Setup an orbit propagation example with shape and attitude dependent drag and lift coefficients
- Use data from historic reentry events to evaluate the new method
REFERENCES
- https://doi.org/10.1016/j.jsse.2023.11.009
- https://doi.org/10.1016/j.ast.2022.108077
- https://doi.org/10.1029/2020ea001321
CONTACT
Dr. Stephan Hellmich: stephan.hellmich@epfl.ch
STATUS OF THE PROJECT
Life Cycle Assessment data augmentation and ecodesign optimization using machine learning
- Supervisor: Marnix Verkammen / Prof Jean-Paul Kneib
- Type of project: Master thesis, 1 student
- Duration: One semester
- Submission of final report: TBD
- Final presentation: TBD
- Recommended: This project is suitable for a student interested in sustainability, software development, and the space sector. Prior knowledge on machine learning is essential. Knowledge on life cycle assessment (LCA) and LCA tools (e.g. Brightway2, etc) is a plus, but not essential.
CONTEXT
eSpace is actively researching and developing methods and products in space sustainability. This large topic includes work on space debris risks, life cycle assessment of space systems, mitigations of environmental impacts, and decision-making support to include sustainable aspects in the early design phase of space missions and systems.
A Life Cycle Assessment (LCA) follows specific steps, which may need to be iterated. The key first step is to define the precise goal and scope of the assessment, including the system boundaries and the assumptions to be made. Following this, the inventory of the various activities and corresponding emissions ought to be made in the Inventory Analysis (LCI). The resulting environmental impacts of these activities and emissions are then computed in the Life Cycle Impact Assessment (LCIA) phase. It is only after this that the results may be interpreted in the Interpretation phase, before conclusions and actions may be taken. This is summarised in the figure below.
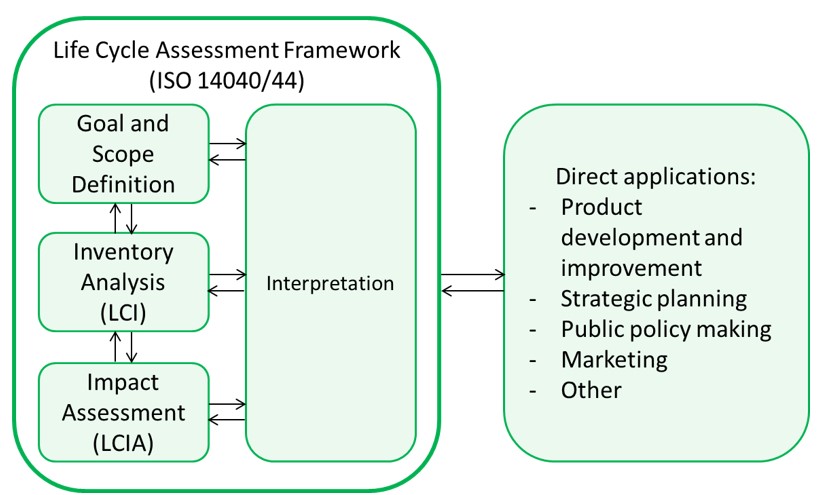
https://blogs.esa.int/cleanspace/2018/04/20/how-to-make-environmental-friendly-space-missions/
The least intuitive step of Life Cycle Assessment may be that of the interpretation, necessary for any decision making and mitigation of environmental impacts of a future design. It involves assessing a multitude of impacts, classified in various impact categories, and drawing conclusions regarding the overall environmental performance of the system analysed. There is a high risk that, during this step, the interpreter cherry-picks more commonly known impact categories, such as Climate change potential and Resource Use, and ignores lesser-known ones, such as Eutrophication or Ozone Depletion. This lack of a global picture of the entire environmental impacts may result in wrong decisions being made during the eco-design process, and may even lead to burden-shifting, where the environmental burdens are increased in specific impact categories, unbeknownst to the interpreter.
Additionally, LCA practitioners in the space sector often lack data to perform LCA correctly. The leading space LCA dataset is the one provided by the European Space Agency, which contains just under 1000 datasets. Nevertheless, one of its biggest criticisms is the lack of datasets specifically tailored to non-ESA space systems. Collecting the required data is a lengthy process, and relying on proxy-datasets could result in final results with high uncertainties.
Therefore, the EPFL Space Center has progressively been working to address these issues. Together with the EPFL spacecraft team, the first conceptual work on ecodesign software supported by machine learning was presented at a conference. A MSc student explored the ways in which Machine Learning can be used to augment data and how one can create an ecodesign optimizer software., The results are quite promising, with relatively good predictions from training.
Now, the EPFL Space Center wants go one step further and consolidate the past work by validating the machine learning methodology, improving it and diving deeper. In particular, further investigation is needed into the prediction’s accuracy when it comes to the LCA results and more steps need to be taken towards an ecodesign optimizer.
PROJECT SCOPE
The student shall:
- Understand previous work done at the EPFL Space Center
- Gather information on similar tools in adjacent industries.
- Research and implement the best ways to improve the current machine learning data augmentation methodology
- Develop an Ecodesign optimiser, based on past work.
OUTCOME
Improvement, validation and test of the machine learning data augmentation method:
- Verification of the accuracy of the LCA results of the predicted datasets
- Improvement of the machine learning methodology
- Test of the creation of new datasets and comparison with litterature
Development and implementation of ecodesign optimiser:
- Implementation of the optimizer concept from past work
- Further development and improvement of the optimizer
- Test of the optimizer based on ecodesign found in literature.
A report which contains:
- A literature review of ecodesign tools and past work.
- An explanation of the reasons behind the improvement suggestions of the Machine Learning algorithm
- A clear explanation of the implementation of the optimizer
- Suggestions for future work and improvements
TASKS
- Literature review on existing ecodesign tools and ecodesign tools powered by a Neural Network
- Research into improvement options of past work (particularly the machine learning methodology)
- Development of the optimizer
- Identification of suggested future work and improvements
CONTACT
Marnix Verkammen, Engineer at EcoDeltaV: marnix.verkammen@ecodeltav.com
STATUS OF THE PROJECT
Investigate the break-up of the geostationary satellite Luch/Olymp
Supervisor: eSpace/LASTRO/s2a-systems (Jean-Paul Kneib, Stephan Hellmich, Roger Spinner)
Type of Project: Master thesis project
Duration: 26 weeks (Official start/end date: TBD)
Thesis submission date: TBD
Final Presentation date: TBD
This project is suitable for a student interested in space surveillance and tracking, processing of astronomical data and orbital mechanics. Prior knowledge in Python is a plus.
CONTEXT
The orbital environment is currently reaching a critical threshold due to the accumulation of space debris, a situation caused by the rising number of decommissioned satellites that remain in orbit for centuries or even longer. In high-altitude regions like the Geostationary Orbit (GEO) and its graveyard orbit, a few hundred kilometers above, the lack of atmospheric drag results in fragments from satellite breakup persist for thousands of years. Decommissioned satellites pose a dual threat: they represent large, unmaneuverable targets for unintended collisions and carry potential internal energy sources that can lead to spontaneous explosions if not properly passivated. Such fragmentation events create clouds of high-velocity particles that can disable operational satellites, potentially triggering the Kessler Syndrome – a cascading chain reaction of collisions that could eventually render entire orbital regions unusable for future generations.

Fragmentation of Luch/Olymp recorded by s2a-systems
The Luch/Olymp satellite (NORAD catalog number 40258), launched in 2014, in the geostationary orbit (around 35,786 kilometers above the equator) was recently decommissioned and sent into the graveyard orbit above GEO in October 2025. S2a-systems, s Swiss SSA/SDA company, has acquired data from Luch/Olymp since the decommissioning and also recorded the sudden break-up of the object on January 30. 2026. The breakup of a large, complex satellite like Luch/Olymp creates a new population of unmanaged debris in a sensitive orbital region. According to initial reports from s2a systems and space debris experts, either a space debris impact or a passivation failure (e.g., fuel or battery explosion) may have caused the fragmentation. The observations suggest that the object maintained a stable attitude until the break-up event. During a period of about 45 minutes, several explosions were recorded releasing multiple trackable fragments.

Long-time exposure after the event showing the parent body and fragments released
PROJECT SCOPE AND TASKS
This project is intended to investigate the breakup event in order to better understand the consequences of the explosion and potential implications on the orbital environment. The investigation consists of the following tasks:
- Familiarize yourself with the data and software tools for astronomical image processing (astrometry.net, astropy, photutils) and orbit determination (Tudat, Orekit)
- Determine a precise astrometric solution for each individual image using field stars
- Monitor the lightcurve (changes in brightness) of the parent body to investigate the change of rotation/tumbling during the fragmentation
- Detect, count, characterize and track the individual fragments released from the parent body
- If possible, determine the orbits of the fragments that can be used to schedule follow-up observations
- Perform long-term orbit propagation to assess the threat of the resulting debris cloud to operational geostationary satellites over the next 50 – 100 years
- Apply synthetic tracking on images just before the fragmentation to search for potential impactors that could have triggered the fragmentationCONTACT
Dr. Stephan Hellmich: stephan.hellmich@epfl.ch
STATUS OF THE PROJECT
Characterize the most dangerous derelict objects in Low Earth Orbit
- Supervisor: eSpace/LASTRO (Jean-Paul Kneib/Stephan Hellmich)
- Type of Project: Semester project
- Duration: 14 weeks (Official start/end date: February 16 – May 29)
- Submission of final report: June 12
- Final Presentation: TBD
- Recommended: This project is suitable for a student interested in space surveillance and
tracking and processing of astronomical data. Prior knowledge in Python is a plus.
CONTEXT
Low Earth Orbit (LEO) is becoming more and more crowded with satellites. While the active satellites can perform risk reduction and collision avoidance maneuvers in order to prevent catastrophic events, defunct satellites, upper stages and space debris left in LEO pose a significant threat to the orbital environment. A single collision between two of these objects could lead to large parts of the orbit becoming unusable. Active Debris Removal (ADR) missions will need to be performed to clean the LEO from these dangerous objects. In order to support ADR missions, a collaborative project between Uni Bern and EPFL to better characterize space debris has been recently started. The main goal of this project is to design and build an Adaptive Optics (AO) system for the Zimmerwald 80cm telescope to enable the acquisition of resolved images of LEO debris. EPFL is supporting the project with unresolved data. This data will be acquired with the 60cm TELESTO telescope at the observatory of Geneva in Versoix. The control software of TELESTO is currently upgraded to allow precise satellite tracking and basic functionality was achieved during the last semester.

TELESTO, a 60 cm telescope at the University of Geneva and acquired images of the D-Orbit spacecraft that hosted the Bunny onboard computer built by the EPFL space craft team
PROJECT SCOPE
The goal of this project is to identify suitable targets for observations from the list of the 50 most dangerous objects in LEO, schedule and conduct observations of these candidates with TELESTO. Target selection needs to be coordinated with Uni Bern and s2a-systems, a Swiss SSA company that is the implementation partner in the collaborative project. The observations with TELESTO will be conducted from a remote observing station at the EPFL Space Center. Python scripts to compute overhead passes of the selected targets need to be implemented in order to plan the collaborative observation campaign. The observations will take place after sunset during the first hours of the night.
TASKS
- Familiarize yourself with the telescope and the software interface (ASCOM, Alpyca) and tools for orbit propagation to compute satellite positions (skyfield)
- Identify suitable targets for observations from the list of the 50 most dangerous objects in LEO
- Implement a python script to predict overhead passes of the selected candidates on at observation sites of all candidates
- Carry out observations with TELESTO
CONTACT
Dr. Stephan Hellmich: stephan.hellmich@epfl.ch
STATUS OF THE PROJECT
Support the IAU Center for the Protection of Dark and Quiet Skies
- Supervisor: eSpace/LASTRO (Prof. Jean-Paul Kneib/Stephan Hellmich)
- Type of Project: Semester project (TP4b)
- Duration: 14 weeks (Official start/end date: February 16 – May 29)
- Submission of final report: June 12
- Final Presentation: TBD
- Recommended: This project is suitable for a student interested in astronomy and space sustainability.
CONTEXT
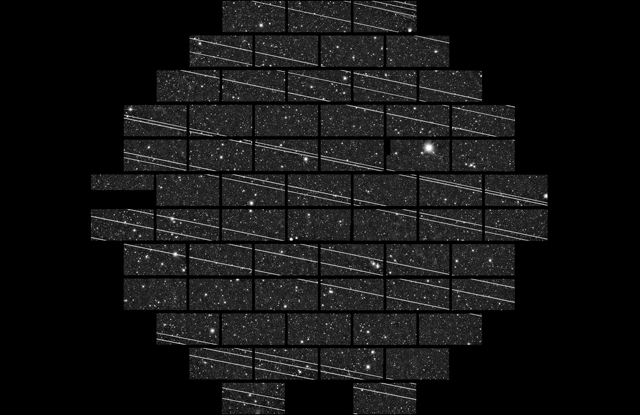
Astronomy is more and more affected by satellite mega constellations. To better understand the implications of satellite constellations on astronomy and to foster collaboration between astronomers, observers and satellite operators, the International Astronomical Union (IAU) has created the Centre for the Protection of the Dark and Quiet Sky from Satellite Constellation Interference (CPS). The mission of the IAU CPS is to coordinate efforts and unify voices across the global astronomical community with regard to the protection of the dark and quiet skies. The EPFL Space Center recently joined these efforts and is supporting the CPS with various activities. With Project Kuiper, Amazon recently started deploying the next large satellite internet constellation. This project is intended to contribute to the observation campaign organized by the CPS to determine the optical brightness of Amazon’s Project Kuiper constellation satellites. The observations will allow the CPS to evaluate the brightness mitigation techniques that Amazon already considered during satellite design and also provide the CPS with important information required to discuss with Amazon how to further improve the design or operation of their satellites.
PROJECT SCOPE
During the project, you will familiarize yourself with the TELESTO telescope at the Observatory of Geneva which will be used for the observations and the tools necessary to plan and perform observations of satellites. You will further acquire data with TELESTO, learn how to obtain astrometric and photometric measurements and how observations are shared with the IAU CPS.
TASKS
- Familiarize yourself with TELESTO and the tools necessary to plan observations and acquire data
- Develop tools to plan and automatize the observations
- Perform brightness measurements of the observed targets
- Share the data with the IAU CPS
CONTACT
Dr. Stephan Hellmich: stephan.hellmich@epfl.ch
STATUS OF THE PROJECT
Design and manufacturing of space-grade electronic hardware for educational test in TVAC and Clean Room
- Supervisor: Emmanuelle David / Gilles Feusier
- Type of Project: Semester project, 1 student
- Duration: 14 weeks
- Submission of final report: TBD in June 2026
- Final Presentation: TBD
- Recommended: This project is suitable for an ambitious student interested in the space industry, wishing to gain hands-on experience in the design of space systems, to apply their engineering skills to a very demanding sector and to improve EPFL’s education for future students. Knowledge of the space sector’s constraints is a plus, and general knowledge in system engineering is recommended.
CONTEXT
EPFL delivers a wide range of space-specific courses, covering topics such as space mission design, space mechanisms, space propulsion, space sustainability and New Space economy. Beyond these in-depth theoretical classes, the EPFL Space Centre’s goal is to provide hands-on experiences to students, to make space engineering more tangible.
One series of courses in which this will be most relevant are those revolving around space systems engineering, particularly the course EE-584 Spacecraft Design & System Engineering. In that course, a practical session has been pioneered in the 2024 autumn semester, where students had the opportunity to visit the Clean Room, see the Thermal Vacuum Chamber (TVAC) and observe a small electronics board.
For this course, a more complete hands-on practicum is to be developed, during which students will manipulate a notional space-grade electronics hardware in the TVAC and/or the Clean Room. This hardware will simulate a subsystem of a small satellite and will have the necessary interfaces for tests to be performed.
PROJECT SCOPE
In this project, the student will research common electronics for a small satellite’ subsystems, choose off-the-shelve components and design a simplified spacecraft subsystem for practical sessions in EE-584, which shall be compliant with assembly in a clean room environment, and which can be tested under thermal vacuum (temperature range to be defined). If time allows, the hardware will be produced and readied for the autumn semester of 2025. Moreover, the student will propose next steps for the practical classes in the space system engineering courses offered by EFPL. This may include a next hardware update and a larger vision on the hands-on approach of the EPFL classes.
OUTCOME
- List of common space-grade off-the-shelve components for notional spacecraft subsystems, compliant to clean room assembly and to thermal vacuum testing, and their usability to this project
- Design of a notional spacecraft subsystem tailored to be handled and tested during the practical sessions of the lectures, as defined by the lecturers of EE-584
- If time allows production of the hardware (or outsourcing of the production
- Discussion on next steps for the hardware and on future avenues for practical classes in EPFL’s space lectures.
TASKS
- Literature review of off-the shelves components that can be used for space-grade hardware or simulate it.
- Design of a notional space electronics hardware
- Suggestions for next steps (for hardware and education)
CONTACT
- Emmanuelle David: emmanuelle.david@epfl.ch
- Gilles Feusier: gilles.feusier@epfl.ch
STATUS OF THE PROJECT
EPFL Rocket Team
Click HERE to visit the EPFL Rocket Team’s projects page.
EPFL Spacecraft Team
Click HERE to visit the EPFL Spacecraft Team’s projects page.
Xplore
Click HERE to visit Xplore’s projects page.
Asclepios
Click HERE to visit Asclepios’s projects page.