LEAPS is a case study of a potential mission toward the Philolaus Crater and its prospective lava tubes. Outcomes of such a mission would be to ascertain the presence of sub-surface cavities at the polar regions, which could yield similar characteristics to Permanently Shadowed Regions (PSRs) at the lunar poles, and thus host water-ice. Should this be the case, extraction may prove to be easier than at PSRs on the North and South poles of the Moon. The technology mentioned here is mainly brought forward by programs such as NASA’s Commercial Lunar Payload Services (CLPS). Indeed, many missions are planned in the foreseeable future, which should considerably increase the maturity levels of said technologies. LEAPS essentially makes use of soon-to-be off-the-shelf components, or COTS(mid to high TRL), to create a modular and versatile configuration of various payloads, assigning independent tasks to each of them to finally reach a common, final mission objective.
Lava Tubes & Skylights
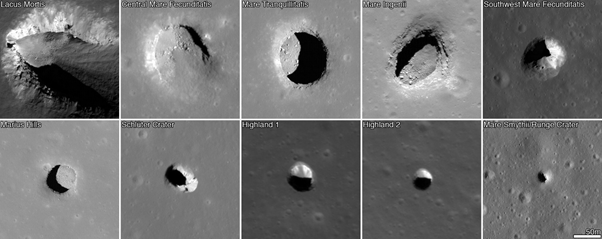
Lunar lava tubes, beyond their great significance for selenologist,have been of increasing interest due to their potential as shelters for future astronauts. Indeed, they could offer protection against solar and cosmic radiation as well as provide a relatively stable temperature, as opposed to the wide temperature fluctuations present on the lunar surface. Moreover, they provide interesting resources to extract and use for future Moon and Mars related missions [1][2]. These caves can be identified by observing the presence of Sinuous Rilles, or channel-like depressions that run along the surface, which indicate the presence of sub-terrain lava flows. Pits along these depressions are known as “skylights” and provide an opening and entrance into the lava tube. Over 200 skylights have currently been identified on the near side of the Moon [3], although their location at low latitudes makes the prospect of them hosting water-ice unclear at this stage. Potential skylights reside in the Philolaus Crater, in the vicinity of the northern pole (72°N). If confirmed, the buried lava tubes could yield similar characteristics to Permanently Shadowed Regions (PSRs), present on both the lunar southern and northern poles, and effectively host water-ice.
Lunar Water-Ice
Water ice is an ISRU of high interest, as it would not only allow astronauts to hydrate but also serve as propellant, hence presenting cost-effective solutions to inter-planetary travel. The lunar poles present the highest abundance of water-ice in PSRs. This makes extraction difficult as harvesting it would have to operate in extremely low temperatures with no direct access to solar power [1] [2].
Most of the aforementioned pits reside in latitudes below 60°, which lowers the prospect of them being able to harbour any H2O ice as their sunlit floors would heat up the adjacent caves through radiation [3].
Philolaus Crater Skylights
Potential Skylight candidates reside in the Philolaus crater, a young crater from the Copernican era. The latter being relatively close to the northern lunar pole, corresponding lava tubes could host a larger abundance of water-bearing volatiles [2][3], prospecting a self-sustained environment.
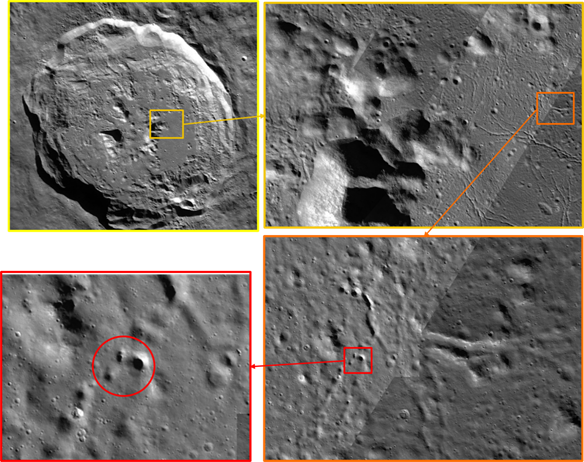
The nested images of Philolaus crater shown in fig. 3 illustrate the presence of an impact melt sheet (top-right). This relatively smooth surface could prove to be a feasible landing area, with direct communication links to Earth [2].
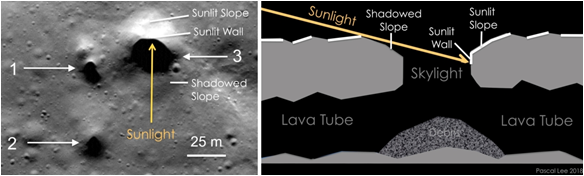
Due to the high latitude of the crater, the sunlight angle is too low to enter the skylight, essentially grazing the skylight rim. These skylights are estimated to yield similar characteristics to PSRs present in the lunar poles, hereby increasing the prospect of the caves harbouring water-ice within them (if present in the first place) [1].
LEAPS Concept of Operations
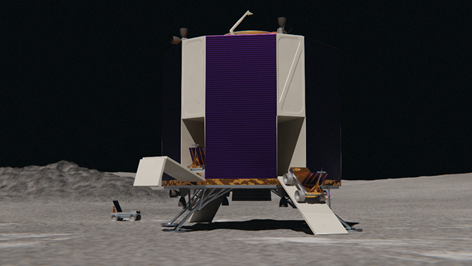
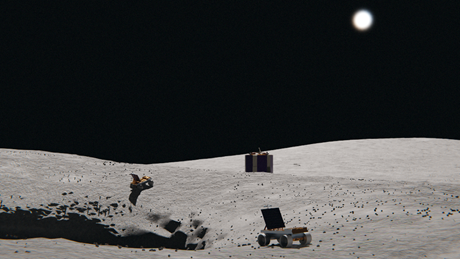
The LEAPS mission aims to make use of ongoing technological research [4] and is designed to deliver a lander and a set of “micro-rovers” on the lunar surface, specifically tasked to explore the skylight interiors and surroundings through light sensing mapping and in situ science. These micro-rovers have the undeniable advantage of being lightweight and capable of traversing long distances on the lunar terrain at high speeds. LEAPS objectives stem from the scientific interest behind the presence of caverns in polar regions of the Moon, and the prospective use of local resources within them.
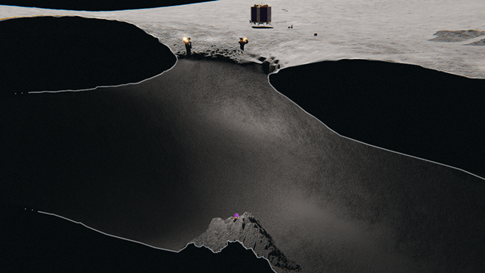
These objectives will firstly be met by flying over the skylight during landing and obtain 3D imagery of its interiors and surroundings with a pit modelling instrument (flash LIDAR) [4][5] as illustrated in the figure below.
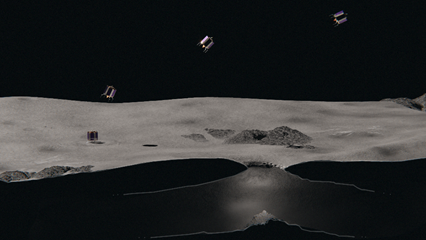
Upon touchdown, the lander will deploy a swarm of 6 micro-rovers with different scientific instruments to investigate the skylights and lava tubes from the surface. The previously airborne acquired pit models can be further complemented by deploying a rover that can provide enhanced details from LIDAR data acquisition. This is done by essentially circumnavigating the pit rim to increase surface coverage [6][7] – that is, by acquiring LIDAR and imagery data from various vantage points along the skylight (fig. 6).
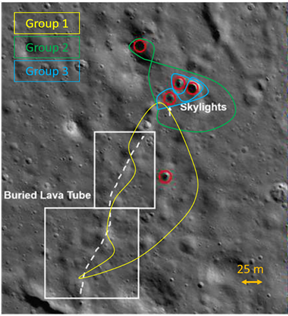
This rover network will be broken down into three categories, consisting each of 2 rovers with different sets of scientific instruments such as a Ground Penetrating Radar (GPR), Neutron Spectrometer (NS), and a flash LIDAR. This will aid in achieving better overall performance by reducing the power consumption, assigning specific scientific tasks to each group and by finally providing further redundancy. Furthermore, the independent tasks of the heterogeneous rover groups all lead toward the resolution of common mission objectives. Objectives include but are not limited to mapping the lava tubes from the surface (with the GPR), mapping the skylights from the lander and rovers (to obtain better depth assessment of the tubes) as well as determining the presence of water-ice within the caves. A potential trajectory map for the heterogeneous swarm is suggested in figure 7, hereby illustrating the benefits of diverse payload configuration on the rover’s power consumption, and hence the total achievable distance, which considerably increases with lower robotics power consumption [8][9].
The question on how to handle the End of Life (EoL) operations arises as the rovers would unlikely survive the lunar night, which lasts for a total of 14 Earth days on average. To this end, the rovers shall successively attempt to enter, or leap, into a pre-determined skylight to attempt to meet secondary objectives. Should the leap be successful, the rovers will be able to assess in more detail the presence of water-ice within the cave interiors, and would solely result as an added benefit to the mission. Rovers remaining at the surface shall transmit the acquired data back to the lander, which in turn will downlink it back to Earth for processing.
Context and acknowledgments
At this stage, albeit feasible, LEAPS would require more detailed attention to the procedural aspects on how to make such a mission concept a reality. The mission study and concept presented here was done for the Spacecraft Design and Systems Engineering Masters course given by Prof. Bernard Foing at the Swiss Federal Institute of Technology Lausanne (EPFL) [10]. All the information presented here is issued from the associated publication [8] which is available upon request. Acknowledgements are also addressed to Eric Nardini, friend and colleague, for the great renders of the LEAPS mission.
Abbreviations:
- CLPS – Commercial Lunar Payload Services Program
- COTS – Components Off-The-Shelf
- EoL – End of Life
- GPR – Ground Penetrating Radar
- ISRU – In-Situ Resource Utilisation
- NS – Neutron Spectrometer
- PSR – Permanently Shadowed Regions
- TRL – Technology Readiness Level
References:
- Pascal Lee Possible Lava Tube Skylights Near the North Pole of the Moon Mars Institute, SETI Institute, NASA Ames Res. Center.
- Pascal Lee, Ice-Rich Caves On The Moon And Mars: Prospects And Pragmatic Recommendations For Exploration. Mars Institute, SETI Institute, NASA Ames Research Center, 3rd International Planetary Caves 2020
- Wagner & Robinson “Distribution, Age, and Formation Mechanisms of Lunar Pits,”, (2014), NESF
- William Whittaker, Astrobotics Technology Technologies Enabling Exploration of Skylights, Lava Tubes and Caves NASA Innovative Advanced Concepts (NIAC)
- William Whittaker, Astrobotics Technology Exploration of Planetary Skylights and Tunnels NASA Innovative Advanced Concepts (NIAC) Pase II
- Heather L. Jones, Uland Wong, Kevin M. Peterson, Jason Koenig, Aashish Sheshadri and William L. “Red” Whittaker Complementary Flyover and Rover Sensing for Superior Modeling of Planetary Features
- W.L.Whittaker, H.L. Jones, U. Won, J.S. Ford, W.C. Whittaker, N. Khera, and A. Horchler Microrover Exploration Of Lunar Pits Deployable By Commercial Lander The Robotics Institute, Carnegie Mellon University, Virtual Conference October 2020
- Dimitri Hollosi LEAPS: Lunar Expedition to Ascertain the Philolaus Skylights Federal Institute of Technology Lausanne, IAF Digital Library
- Xuesu Xiao and William L. “Red” Whittaker Energy Utilization and Energetic Estimation of Achievable Range for Wheeled Mobile Robots Operating on a Single Battery Discharge Carnegie Mellon University
- Bernard Foing, Muriel Richard Spacecraft Design and Systems Engineering EPFL Course